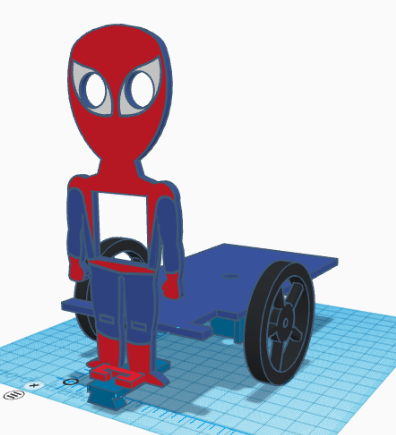
En esta entrada os mostramos el ensamblaje del robot DYOR SpiderBot realizado con TinkerCAD y fabricado con corte láser
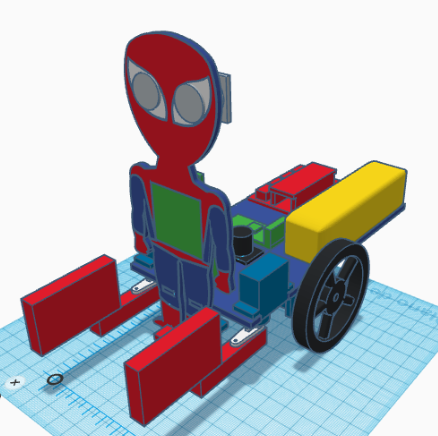
Componentes:
- Arduino Nano + Shield Arduino Nano I/O (rojo)
- Powerbank (amarillo)
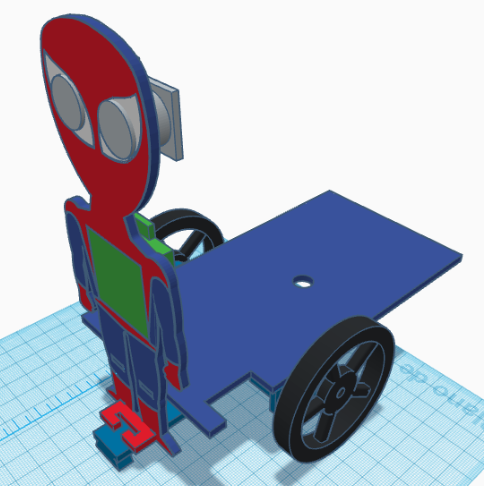
- Ultrasonido HC-SR04 (gris claro)
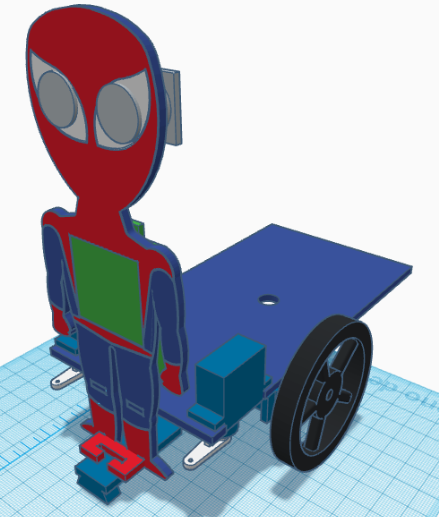
- Zumbador de sonido (negro)
- Servos SG90 (azul oscuro) en el frontal
- Servos FS90R (azul oscuro) en la base
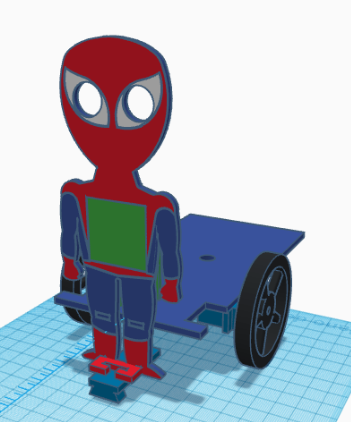
- Bluetooth (verde)
- Seguilíneas TCRT5000 (azul oscuro)
- Rueda loca (blanco)
- Ruedas FS90R (negro)
- Matriz de LEDs (verde)
- Piezas de LEGO (rojo)
Instrucciones:
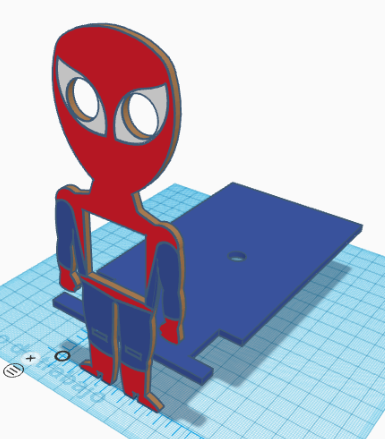
Colocar la pieza del frontal junto con la base y pegarlas.
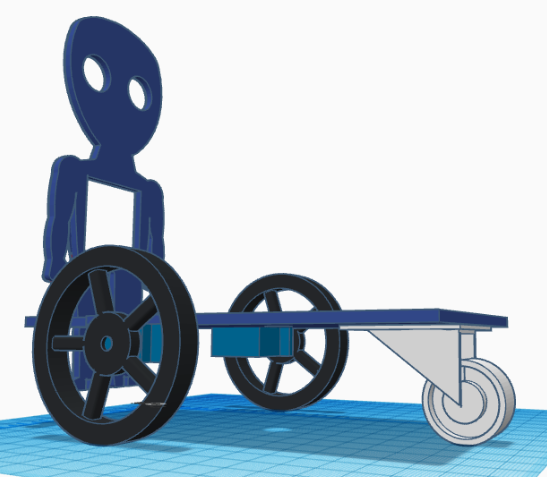
Pegar los servos FS90R a la base, estando el eje lo más atrás posible y atornillar las ruedas.

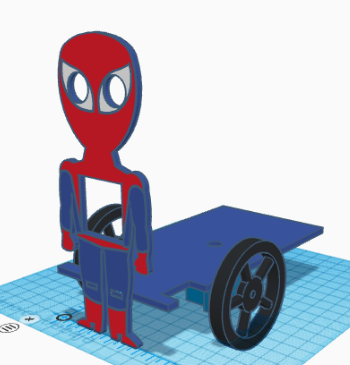
Pegar la rueda loca en la parte trasera de la base
Pegar el soporte del sensor TCRT5000 en los pies de forma horizontal y pegar el sensor al soporte (por debajo).
Pasar los cables, tanto de los servos FS90R como del sensor TCRT5000 por el orificio que tiene la base. Una vez pasados los cables, podremos pegar la matriz de LEDs al frontal con los cables de conexión por la parte inferior.
Pegar el sensor de ultrasonidos
Pegar los servos SG90 de posición apuntando hacia abajo en los orificios correspondientes de la base. El eje del servo debe de estar lo más adelantado posible. Las manillas de los servos, deben atornillarse de forma que la posición mínima esté justo apuntando hacia las piernas del frontal.
Pegar ahora las piezas de LEGO a las manillas del servo.

Pegar la electrónica de Arduino, el Powerbank, el módulo bluetooth y el zumbador de sonido a la base.