En esta publicación vamos a describir el diseño, montaje y programación de DYOR Viseris realizado por Emilio Guillem Simón.
Diseño 2D
El diseño se ha realizado mediante la aplicación QCAD, en la cual se ha conseguido que el robot tenga la siguiente apariencia.
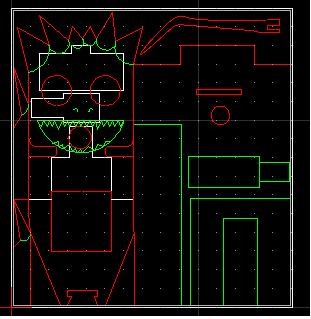
Es un diseño realizado por capas, donde la capa roja indica corte exterior, la verde grabado línea medio y la blanca simplemente sirve de notas.
Componentes:
- Arduino Nano + Shield Arduino Nano I/O
- Powerbank
- Ultrasonido HC-SR04
- Zumbador de sonido
- Servos SG90
- Servos FS90R
- Bluetooth
- Seguilíneas TCRT5000
- Rueda loca
- Ruedas FS90R
- Matriz de LEDs
- Cables macho-hembra
Una vez realizado el diseño, se ha exportado a una máquina de corte láser, la cual realiza primero la parte de grabado de las piezas y a continuación las corta.
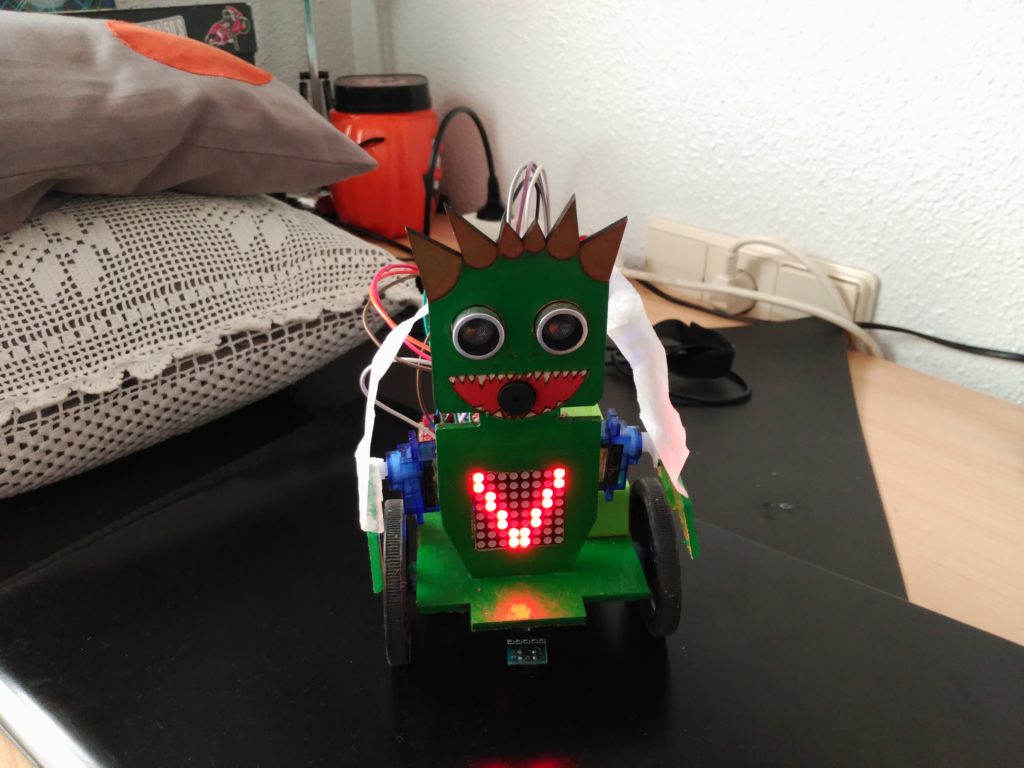
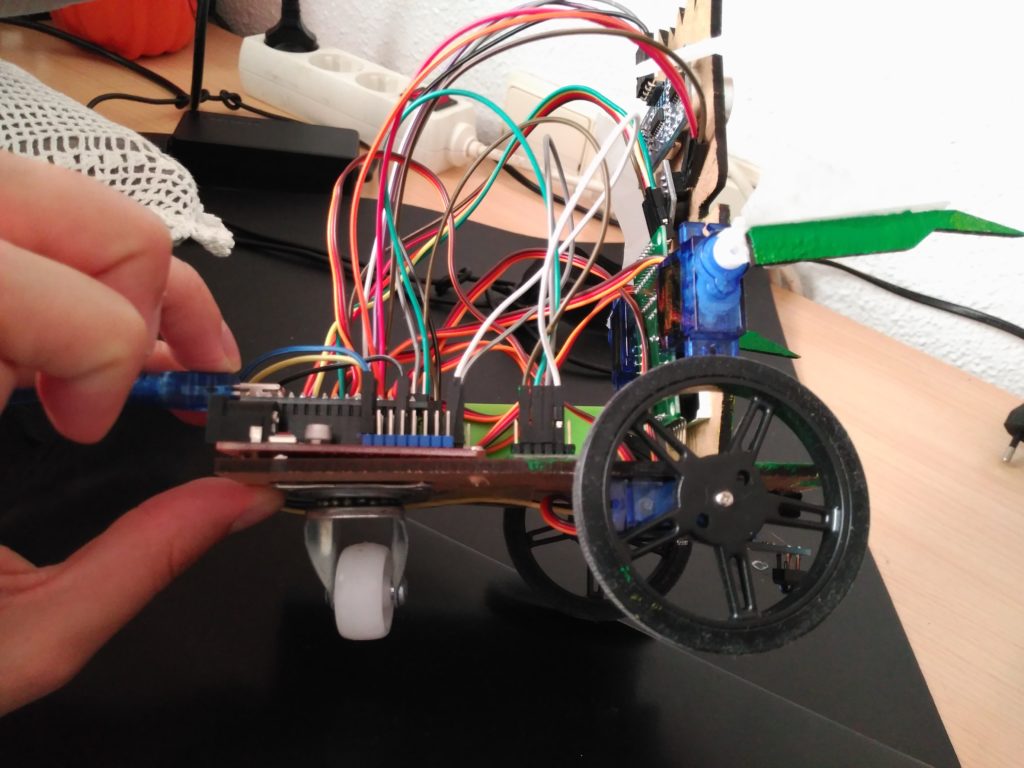
Montaje
Una vez tenemos todas las piezas se ha procedido a la parte de pintura y ensamblaje de las mismas. El robot, una vez montado tiene el siguiente aspecto:
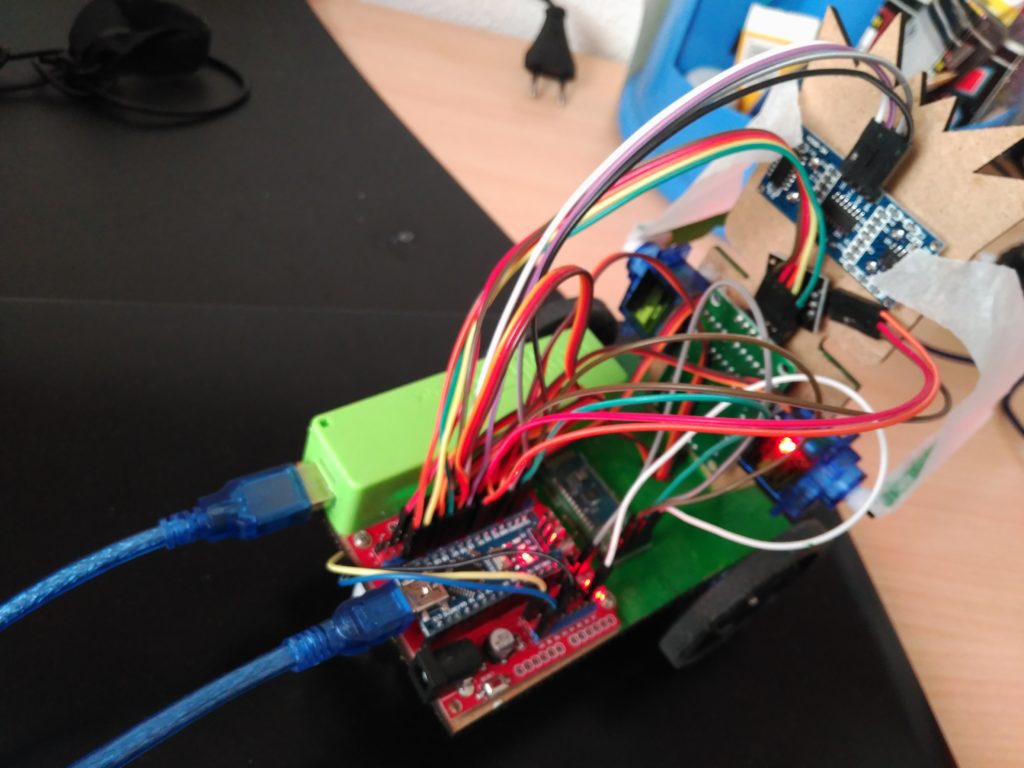
Electrónica
El conexionado de los elementos tiene un aspecto parecido al siguiente:
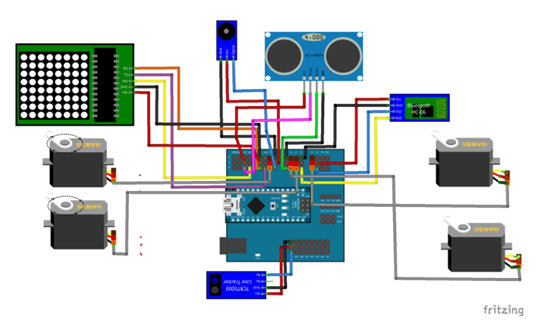
Este era el diseño previo de la conexión de los pines, pero se ha optado por otro tipo de conexión debido al espacio utilizado y la orientación de los diferentes componentes.
Conexionado de pines:
- Bluetooth: TX (D2), RX (D3).
- Servos de rotación continua: Izquierdo (D5), derecho (D9).
- Servos SG90: Izquierda (D11), Derecha (D6).
- Matriz de LEDS: CS (D12), CLK (D13), DIN (D10).
- Ultrasonidos: ECHO (D4), TRIGGER (D8).
- Zumbador: D7.
- Seguilíneas: A0
Código
La mayor parte del código se ha realizado mediante la conexión de los bloques facilitados por Facilino. A pesar de ello, la simple conexión de los diferentes bloques no bastaba para hacer los pequeños retoques sobre el código que han hecho que el programa final tenga menos fallos.
El código, que se adjunta a continuación, se podría separar en tres partes:
- Inicialización: donde se ha inicializado lo pines de los diferentes componente y se ha calibrado el sensor infrarrojo, además de añadir en la matriz de led’s una V(debido al nombre de nuestro robot).
- Programa principal: donde mediante la lectura de los comandos bluetooth se realiza una acción u otra. Destacar que dentro de los comandos recibidos, concretamente el 8 y el 9 nos permiten realizar las acciones de sigue-lineas y evita-obstáculos respectivamente.
- Definición de funciones: dicha parte no se ha modificado ya que son las funciones creadas automáticamente por los bloques de Facilino y que después son usadas en el programa principal.
Código Final del robot DYOR Viseris: CODIGO
Aplicación android

En la pantalla de la app, podemos identificar en la parte superior los botones correspondientes a la conexión y desconexión del bluetooth, cambiar al modo acelerómetro, al modo sigue-lineas y al modo evita-obstaculos, ambos situados en la parte superior derecha.
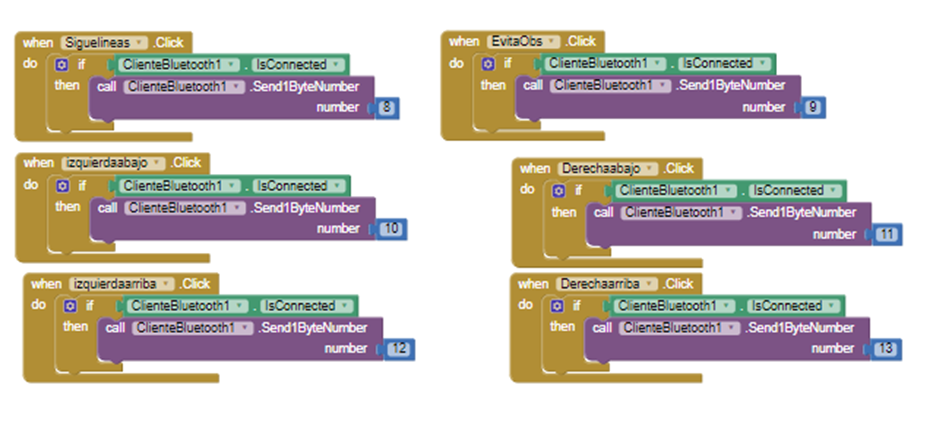
La app también conlleva una serie de bloques intrínsecos, los cuales se encargan de enviar comandos bluetooth al programa arduino del robot.
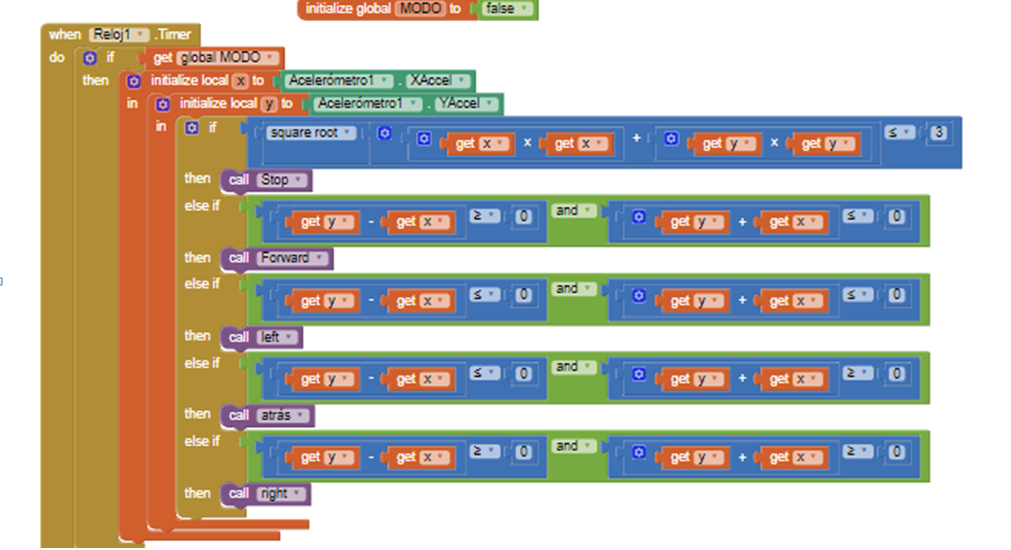
Conjunto de bloques que permiten el control mediante acelerómetro
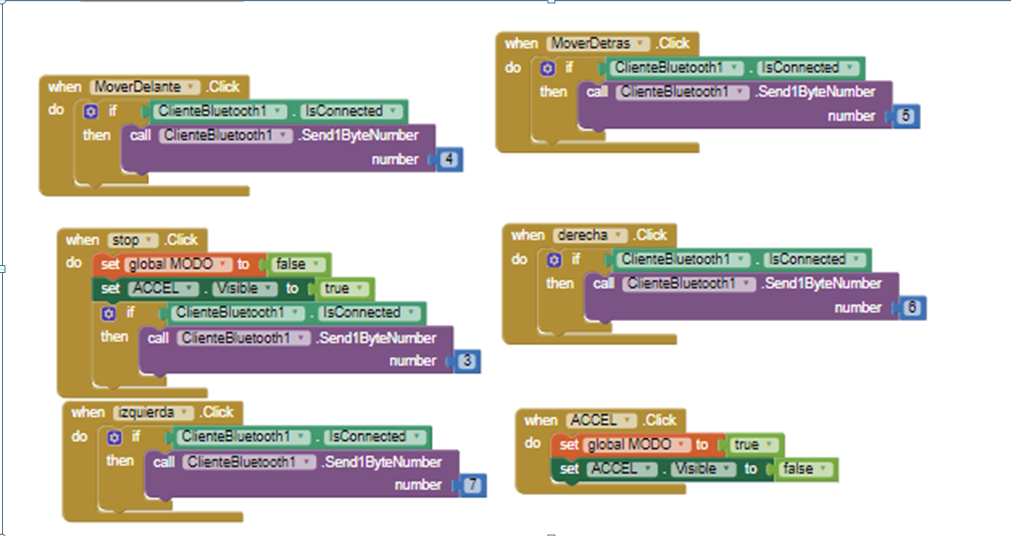
Conjunto de bloques para el resto de los botones
Fotos y videos