En esta entrada explicamos el procedimiento de ajuste del robot DYOR bPED.
El montaje del robot DYOR bPED puede estar desajustado con respecto de la configuración de inicio. Si el desajuste no es demasiado grande, se puede utilizar un procedimiento de calibración/ajuste del robot de forma que por programa podamos hacer que el robot camine adecuadamente.
Materiales
Para este ejemplo, necesitaremos el robot DYOR bPED (cualquier de sus variantes valdrán). En este ejemplo, hemos conectado los servos de la siguiente manera:
- Pierna 1 (Derecha): Pin D4.
- Pierna 2 (Izquierda): Pin D5.
- Tobillo 1 (Derecho): Pin D6.
- Tobillo 2 (Izquierdo): Pin D7.
Facilino
A continuación se muestra el código de Facilino que se necesita para calibrar el robot.
Una vez programado el robot, debería quedase en la configuración mostrada anteriormente. A continuación se muestra el sentido de giro positivo de cada uno de los ejes. La pierna derecha gira hacia fuera con valores positivos, mientras que la pierna izquierda gira hacia dentro. Por otro lado, el pie derecho apoya la parte interior con valores positivos, mientras que el pie izquierdo apoya la parte exterior.
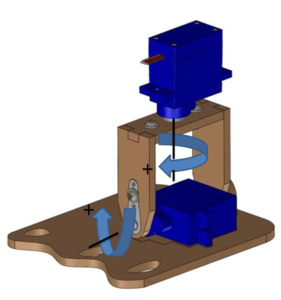
Observando la situación del robot cuando se configura la posición de inicio, debemos averiguar el ángulo de desajuste de cada servo, de forma que utilizaremos el valor contrario. Es decir, si la pierna derecha apuntase hacia afuera, entonces debemos introducir un valor negativo que ajuste su posición hasta que esté recta. Repetir este procedimiento con cada uno de los servos hasta que logréis tenerlos bien posicionados.
¿Qué sucede si mis valores de calibración son elevados?
Lo más conveniente, en este caso, es demontar el robot y asegurarse que los servos están posicionamos en 90º (configuración de inicio) cuando los montamos. Si atornillamos las manillas de los servos cuando están alimentados estos están continuamente realizando un control de posición y por tanto ofrecen un par a cualquier movimiento que trate de desplazarlo de esa posición. Esto evitará que se gire el eje del servo en el montaje.

